
Currently, there are many types of embedded operating systems, such as VxWorks, Windows CE and Linux. Among these operating systems, Linux is the fastest growing and most widely used. Linux is one of the more popular operating systems due to various factors such as usage fees, open source level and usage habits. Because Linux supports multiple processors from x86 to embedded processors, many resources developed on Linux desktop PCs can be easily ported to various embedded platforms. This convenience makes the use of Linux operating systems in embedded systems. Very attractive.
Development environmentHardware environment
The target platform S3C2410 (an embedded processor developed by SAM SUNG using the ARM920T processor core) is used in this system. The ARM920T core consists of ARM9TDMI, Storage Management Unit (MMU) and cache.
S3C2410 resources also include peripheral storage devices (SDRAM and NandFlash), peripheral display devices (touch screen and LCD) and peripheral interface devices (serial port, network port and parallel port).
software platform
The embedded Linux system can usually be divided into the following four parts from the perspective of the software system.
· Bootloader. Includes boot code (optional) and bootloader that are hardened in firmware.
· Kernel. A custom kernel specific to the embedded board and parameters that control the kernel boot system.
·File system. This includes the root file system and the file system built on top of the Flash memory device. It is a vehicle that provides a variety of configuration files for the management system and a good operating environment for the system to execute user applications.
User application. User-specific applications. There may also be an embedded graphical user interface between the user application and the kernel layer. It also has a bootloader, kernel boot parameters, kernel image, and root file system.
Boot loader
The Boot Loader is a small program that runs before the operating system kernel runs. Most Boot Loaders are divided into two parts, stage1 and stage2. Stage 1 mainly contains code that depends on the hardware architecture initialization of the CPU, and is usually implemented in assembly language. The tasks at this stage are: (1) Initializing the basic hardware device (masking all interrupts, turning off internal processor instructions/data caches, etc.), (2) Preparing RAM space for the second phase (if it is from a solid state storage) In the medium, copy the second stage of the Bootloader code to RAM), (3) set the stack and jump to the C program entry point of the second stage. Stage2 is usually done in C language to achieve more complex functions and to make the program more readable and portable. The tasks at this stage are: (1) Initialize the hardware devices to be used at this stage, and detect the system memory map. (2) Read the kernel image and the root file system image from Flash to RAM. (3) Set the startup parameters for the kernel and call the kernel.
The BootLoader used in this system is a vivi developed by Mizi Corporation of Korea, which is suitable for ARM9 processors. Before configuring the compilation, you must first establish a cross-compilation environment. Copy the cross-2.95.3.tar.bz2, arm-linux-gCC-3.4.1.tar.bz2 package to the /usr/LOCal/arm directory, and extract the two packages separately to form the cross-compilation of the system. surroundings.
The main steps to compile Bootload vivi are as follows:
[1] Decompress vivi source file tar jxvf vivi.tar.bz2
[2] Enter the vivi directory to compile the makefile, the main changes are as follows:
LINUX_INCLUDE_DIR = /usr/local/arm/2.95.3/include
CROSS_COMPILE = /usr/local/arm/2.95.3/bin/arm-linux-
ARM_GCC_LIBS = /usr/local/arm/2.95.3/lib/gcc-lib/arm-linux/2.95.3
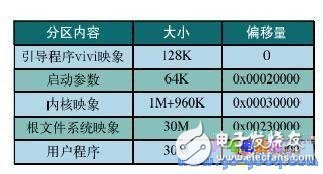
[3] Compile vivi/arch/s3c2410/SMDk.c and partition NandFlash according to the actual situation of the actual board. It should be noted that it should be combined with the following Linux kernel configuration compilation. The 64M NandFlash provided by this development board is used as a storage device, and its space allocation table is shown in Table 1.
[4] make menuconfig
[5] make
At this point, you can generate the bin file of vivi, establish the connection through the JTAG port of the development board and the parallel port of the PC, transplant the vivi to the development board, and re-power it, so that the kernel can be booted.
24v power supply, the current range is 2A-9.2A, the max power is 220w. We also can meet your specific requirement of the prodcuts.The material of this product is PC+ABS. All condition of our product is 100% brand new.
Our products built with input/output overvoltage protection, input/output overcurrent protection, over temperature protection, over power protection and short circuit protection. You can send more details of this product, so that we can offer best service to you!
24V Power Supply,24V Pc Power Supply,24V Dc Power Supply ,24V Power Supply For Pc
Shenzhen Waweis Technology Co., Ltd. , https://www.waweispowerasdapter.com