
First, the heating and cooling of the motor
1, the heating process of the motor
During the operation of the motor, the heat generated by the total loss is continuously generated. When the temperature of the motor rises, there is a temperature rise, and the motor is cooled to the surroundings. The higher the temperature rise, the faster the heat dissipation. When the heat emitted per unit time is equal to the amount of heat dissipated, the motor temperature no longer rises, but maintains a constant temperature rise, that is, in a state of heat and heat balance. This process is an elevated thermal transition process called fever.
Because the specific situation of motor heating is more complicated, for the convenience of research and analysis, assuming that the motor runs for a long time, the load is constant, the total loss is constant, the temperature of each part of the motor itself is uniform, and the ambient temperature is constant.
2, the cooling process of the motor
For a motor running under load, if the load is reduced or stopped after the temperature rise is stabilized, the total loss in the motor and the calorific value Q per unit time will decrease or will not continue to occur. This causes the heat generation to be less than heat dissipation, destroying the thermal equilibrium state, lowering the temperature of the motor, and lowering the temperature rise.
During the cooling process, as the temperature rise decreases, the amount of heat dissipated per unit time also decreases. When the amount of heat is equal to the amount of heat dissipated, the motor no longer continues to cool down, and its temperature rise is stabilized at a new value. When parking, the temperature rise will drop to zero. The process of temperature rise is called cooling.
Second, the choice of motor capacity
Choosing the capacity of the motor is cumbersome, and requires not only a certain theoretical analysis and calculation, but also verification. The basic steps are: according to the load diagram PL= f ( t ) and the temperature rise curve Ï„= f ( t ) provided by the production mechanical load, and considering the overload capacity of the motor, pre-select a motor, and then perform the heat check according to the load diagram. , compare the verification result with the parameters of the preselected motor. If the capacity of the preselected motor is too large or too small, re-select it until its capacity is fully utilized, and finally verify whether the overload capacity and starting torque meet the requirements. .
Third, the choice of motor type, type, voltage, speed
1, the choice of motor type
The principle of selecting the type of motor is to preliminarily select an electric motor with simple structure, reliable operation, low price, convenient maintenance and economical operation on the premise of satisfying the technical performance of the production machine. In this sense, the AC motor is superior to the DC motor, and the asynchronous motor is superior to the synchronous motor. The cage asynchronous motor is superior to the wound rotor asynchronous motor.
When the production machinery load is stable and the starting, braking and speed regulation performance requirements are not high, the asynchronous motor should be preferred. For example, ordinary machine tools, pumps, fans, etc. can be used with ordinary cage asynchronous motors. For air compressors, belt conveyors, etc., which require better starting performance (global electrical resources), deep-slot or double-cage asynchronous motors are available. For example, elevators, bridge cranes, lifting machinery, frequent start and brake, when there are certain requirements for starting, braking and speed regulation of the motor, the wound rotor asynchronous motor should be used. For production machines with high power and no need for speed regulation, such as high-power pumps, air compressors, etc., in order to improve the power factor of the grid, a synchronous motor can be selected.
The speed control range is not required, and the production machinery that can be matched by the mechanical gearbox, such as ordinary machine tools, boiler induced draft fans, etc., can use multi-speed cage asynchronous motors.
For the production machinery with large speed regulation range and smooth speed regulation, such as rolling mill, planer, large precision machine tool, paper machine, etc., it should use the DC motor or the cage asynchronous motor with variable frequency speed regulation.
It is required to start production machinery with large torque and soft mechanical characteristics, such as electric cars, electric motors, heavy cranes, excavators, portable tools, etc. Generally, series or compound DC motors should be used. In special places such as mines with flammable and explosive gases, DC motors cannot be used, but asynchronous motors and synchronous motors should be used.
With the development of AC variable frequency speed control technology, the application of AC motor will become more and more extensive, and it is gradually replacing DC motor.
2, the choice of motor voltage level
The selection of the rated voltage of the AC motor is mainly selected according to the supply voltage level of the place of use. The general low-voltage power grid is 380 V, so the rated voltage of small and medium-sized three-phase asynchronous motors is mostly 380 V (Y or delta method), 220/380 V (â–³/Y connection method) and 380/660 V (â–³/Y Connection method). The rated voltage of single-phase asynchronous motor is 220 V. The high-power motor for large equipment of mining and steel enterprises can use high-voltage motor, which reduces the volume of the motor and saves the amount of copper wire.
The rated voltage of the DC motor is also matched to the supply voltage. The rated voltage of a DC motor powered by a DC generator is typically 110 V or 220 V. The high-power motor can be increased to 600-1000 V. When the grid voltage is 380 V, when the DC motor is powered by the thyristor rectifier circuit, the three-phase rectifier can be used with an optional voltage rating of 440 V, and the single-phase rectifier can be rated at 160 V or 180 V.
3, the choice of motor rated speed
The rated speed of the motor is selected according to the requirements of the production mechanical transmission system. At a certain power, the higher the rated speed of the motor, the smaller the volume, the lighter the weight, the lower the price, the higher the efficiency of operation, and the smaller the flywheel moment of the motor, so it is more economical to use a high-speed motor. However, if the speed required by the production machine is low, if the high speed motor is selected, the transmission mechanism will be complicated.
For production machines that are frequently started, braked, and reversed, if the transition process time has a large impact on production efficiency, the rated speed of the motor should be selected with GD2·nN as the minimum, such as the drag motor of the planer table. If the transition process time has little effect on production efficiency, the rated speed of the motor should be selected with the minimum energy loss during the transition.
4, the choice of motor structure
The structure of the motor is open, protective, closed and explosion-proof. In order to make the motor work in different environments, the protection form of the motor must be selected according to the working environment conditions to protect the motor from long-term work without being damaged.
(1) Open type
The open type motor is cheap and has the best heat dissipation condition. However, since the rotor and the winding are exposed to the air, it is easily eroded by water vapor, dust, iron filings, oil stains, etc., which affects the normal operation and service life of the motor. Therefore, it can only be used in environments where it is dry, has little dust and is free of corrosive and explosive gases.
(2) Protective
The protective motor generally prevents foreign matter such as water droplets and iron filings from falling into the motor, but it cannot prevent the intrusion of moisture and dust. It is only suitable for working environments that are drier and have little dust and are free of corrosive and explosive gases. This type of motor has better ventilation and heat dissipation conditions.
(3) closed
Enclosed motors are available in self-cooling, forced-ventilated and closed versions. Self-cooling motors generally have their own fans. Self-cooling and forced-ventilated motors prevent water droplets or debris from entering the motor in any direction. Humid air and dust are also not easily invaded, so they are suitable for damp, dusty, and weather-resistant. It is the most common application in harsh working environments such as corrosive gases. Closed motors are suitable for production machines that are immersed in liquids, such as submersible pumps.
(4) Explosion-proof
The explosion-proof motor is made of explosion-proof type, increased safety type and positive pressure type on the basis of the sealing structure, and is suitable for working environment with explosion danger, such as mine, oil depot, gas station and the like.
In addition, for motors used in hot and humid areas, high-altitude areas, and ships, motors with special protection requirements should also be selected.
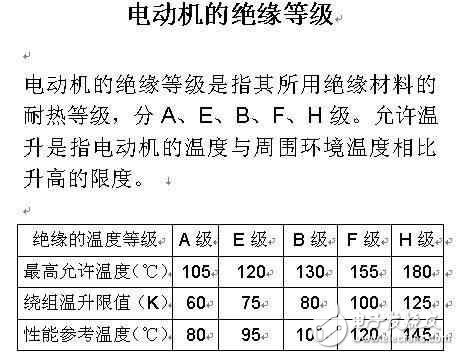
Fourth, the temperature rise and insulation of the motor
When the motor is running under load, its internal total loss is converted to heat to increase the temperature of the motor. The worst heat resistance of the motor is the insulating material. If the load of the motor is too large and the loss is too large and the temperature exceeds the allowable limit of the insulating material, the life of the insulating material is sharply shortened, and in severe cases, the insulation is destroyed. The motor burned and burned. This temperature limit is called the allowable temperature of the insulating material. It can be seen that the allowable temperature of the insulating material is the allowable temperature of the motor; the life of the insulating material is the life of the motor.
Relative to LC To SC UPC Duplex,Optical fiber jumpers (also known as optical fiber connectors), that is, optical fiber connectors that are connected to optical modules, are also available in many types, and they cannot be used mutually. The SFP module is connected to the LC fiber optic connector, and the GBIC is connected to the SC fiber optic connector. The following is a detailed description of several commonly used optical fiber connectors in network engineering:
â‘ FC-type fiber jumper: The external strengthening method is a metal sleeve, and the fastening method is a turnbuckle. Generally used on the ODF side (most used on the distribution frame)
â‘¡SC type optical fiber jumper: the connector that connects to the GBIC optical module, its shell is rectangular, and the fastening method is a plug-in latch type, without rotation. (Most used on router switches)
â‘¢ST type optical fiber jumper: commonly used in optical fiber distribution frame, the shell is round, and the fastening method is turnbuckle. (For 10Base-F connection, the connector is usually ST type. Commonly used in optical fiber distribution frame)
â‘£LC-type optical fiber jumper: the connector for connecting the SFP module, which is made by the easy-to-operate modular jack (RJ) latch mechanism. (Router commonly used)
Lc To Sc Upc Duplex,Lc To Sc Upc Simples,Lc Upc To Sc Apc Simplex,Lc Upc To Sc Apc Duplex
Nanjing Jisu Shitong Technology Co., Ltd , https://www.netairs.com